STM32之GPIO外设
GPIO
学习资料:
前言
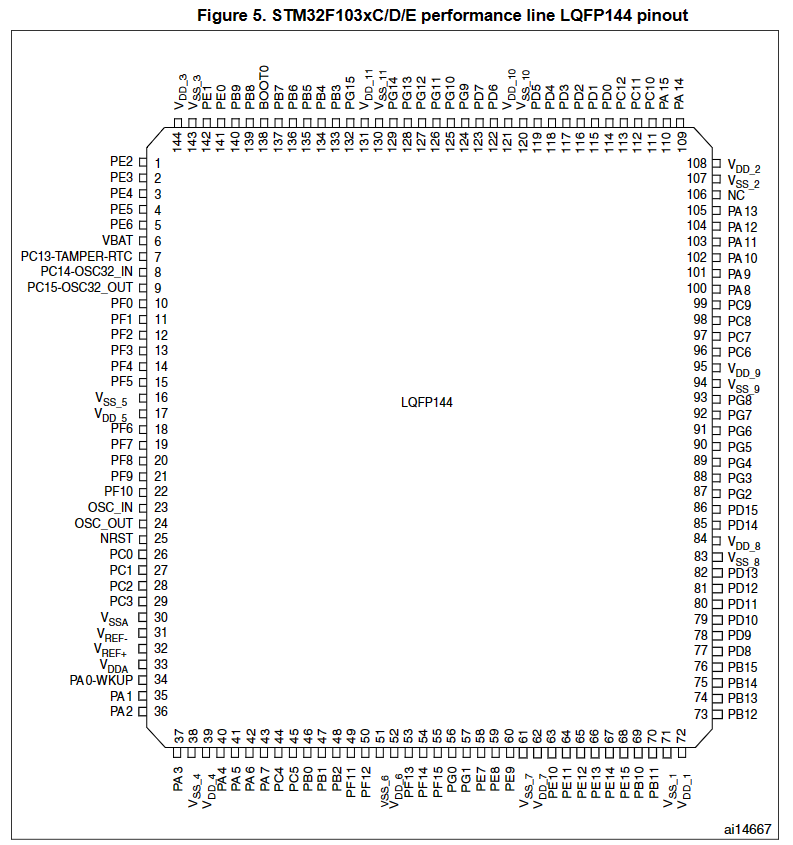
STM32上的144个引脚分为:
- GPIO(General Purpose Input Output)通用输入输出IO口,112个
- PA 16个
- PB 16个
- PC 16个
- PD 16个
- PE 16个
- PF 16个
- PG 16个
- 电源引脚,27个
- VDD 11个 :GND
- VSS 11个 :3.3V
- Vref+ 1个 :开发板模拟部分(ADC/DAC)的参考电压(Vref+和 Vref-)
- Vref- 1个 :开发板模拟部分(ADC/DAC)的参考电压(Vref+和 Vref-)
- VDDA 1个: Vref+的输入 范围为:2.4~VDDA
- VSSA 1个 : Vref-必须和 VSSA 连接在一起
- VBAT 1个 :后备区域供电脚,采用纽扣电池和 VCC3.3 混合供电的方式VBAT 总是有电的,以保证 RTC 的走时以及后备寄存器的内容不丢失
- BOOT引脚 BOOT0 1个
- 复位引脚 NRST 1个,不做其它功能使用
- 晶振引脚OSC_IN 1个 :输入引脚 I
- 晶振引脚OSC_OUT 1个:输出引脚 O
- 106号引脚NC 1个:NO Connect NC引脚悬空或者接地都可以,NC引脚预留是后面H7系列产品升级会在部分NC引脚中做其他功能。
寄存器: 寄存器就是一段特殊的存储器,内核可以通过APB2总线对寄存器进行读写,这样就可以完成输出电平和读取电平的功能了
GPIO的介绍
GPIO(General Purpose Input Output)通用输入输出IO口,是由芯片直接可控制的引脚。GPIO的引脚通过与外部硬件设备连接,可实现与外部通讯、控制外部硬件或者采集外部硬件数据的功能。
GPIO的基本结构
-
可配置为8种输入输出模式
-
引脚电平:0V~3.3V,部分引脚可容忍5V
-
输出模式下可控制端口输出高低电平,用以驱动LED、控制蜂鸣器、模拟通信协议输出时序等
-
输入模式下可读取端口的高低电平或电压,用于读取按键输入、外接模块电平信号输入、ADC电压采集、模拟通信协议接收数据等
-
在STM32中,所有的GPIO都是挂载在APB2外设的总线上的
-
GPIO的MODE配置(输出模式的速度):GPIO的输出速度可以限制输出引脚的最大翻转速度,是为了低功耗和稳定性而设计的
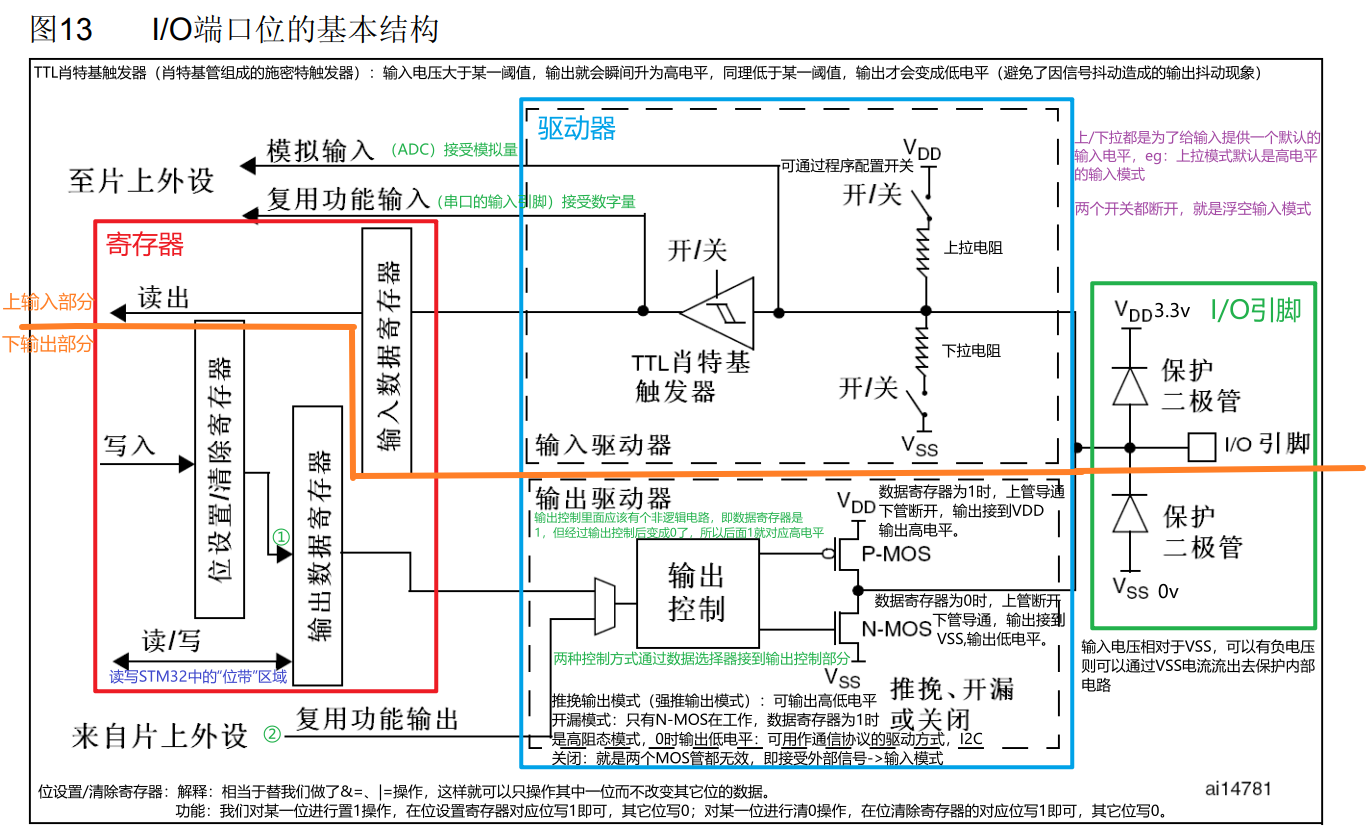
位带区域:在STM32中专门分配有一段地址区域,这段地址映射了RAM和外设寄存器所有的位,读写这段地址中的数据,就相当于读写所映射位置的某一位,相当于51中的位寻址操作
开漏模式:可用作通信协议的驱动方式,eg:I2C;在多极通信的情况下,可避免各个设备的相互干扰,还可用于输出5V的电平信号:在I/O口外接一个上拉电阻(弱上拉),在高阻态(开漏)模式下,可输出5V,在低电平时输出低电平。(开漏模式下低电平有驱动能力,高电平没有驱动能力)
STM32片上外设举例:
-
通用输入/输出(GPIO):用于数字输入输出的引脚。
-
串行通信接口(SPI):用于与其他设备进行高速异步串行通信。
-
串行同步接口(I2C):用于与其他设备进行串行同步通信。
-
通用异步接收器/发送器(USART):用于异步串行数据通信。
-
通用串行总线(USB):用于USB连接和通信。
-
通用定时器/计数器(TIM):用于定时和计数操作。
-
通用同步异步收发器(USART):用于串行通信和数据传输。
-
多媒体卡接口(SDIO):用于与SD存储卡进行通信。
-
同步异步接收器/发送器(UART):用于异步串行通信。
-
时序控制器(RTC):用于实时时钟和日历功能。
-
脉冲宽度调制器(PWM):用于产生可调节脉冲宽度的信号。
-
模拟到数字转换器(ADC):用于将模拟信号转换为数字信号。
-
数字到模拟转换器(DAC):用于将数字信号转换为模拟信号。
-
以太网控制器(ETH):用于以太网连接和通信。
-
控制器区域网络(CAN):用于CAN总线通信。
GPIO的工作模式
输入模式
- 浮空输入(数字输入):可读取引脚电平,若引脚悬空,则电平不确定
- 上拉输入(数字输入):可读取引脚电平,内部连接上拉电阻,悬空时默认高电平
- 下拉输入(数字输入):可读取引脚电平,内部连接下拉电阻,悬空时默认低电平
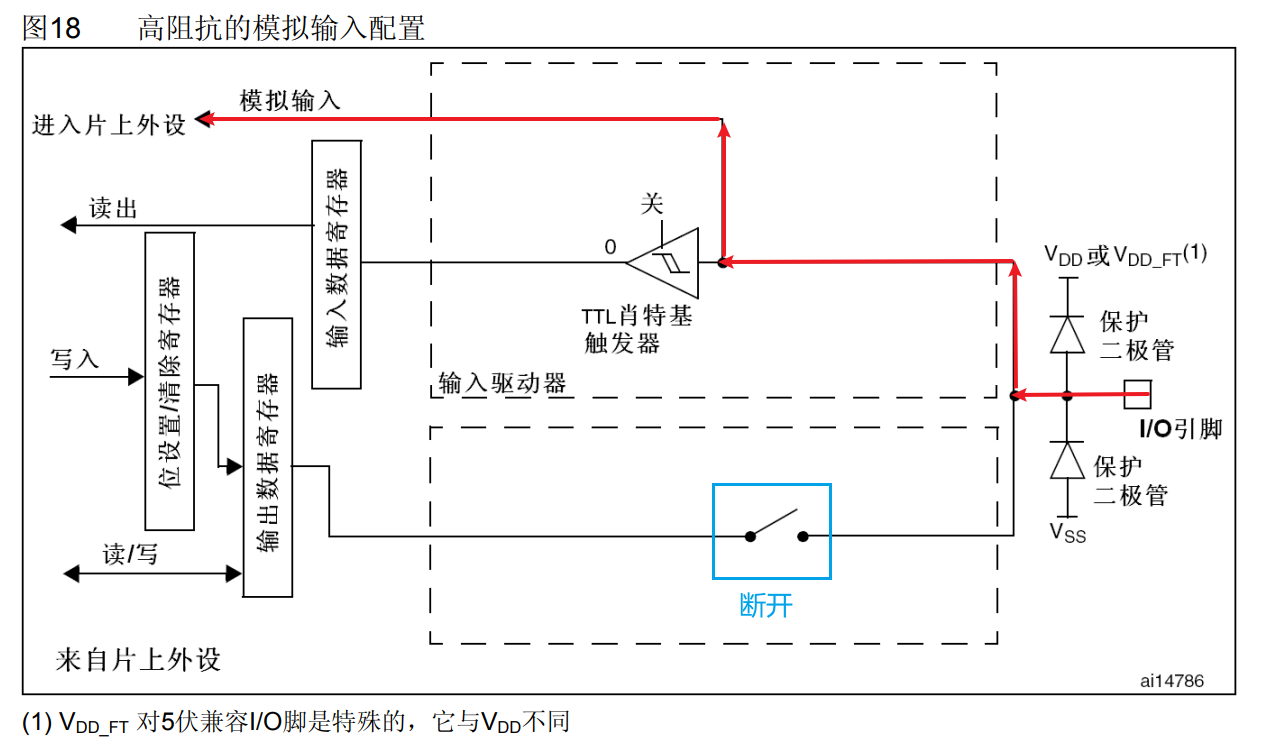
- 模拟输入(模拟输入):GPIO无效(下图中的左侧的所有寄存器),引脚直接接入内部ADC

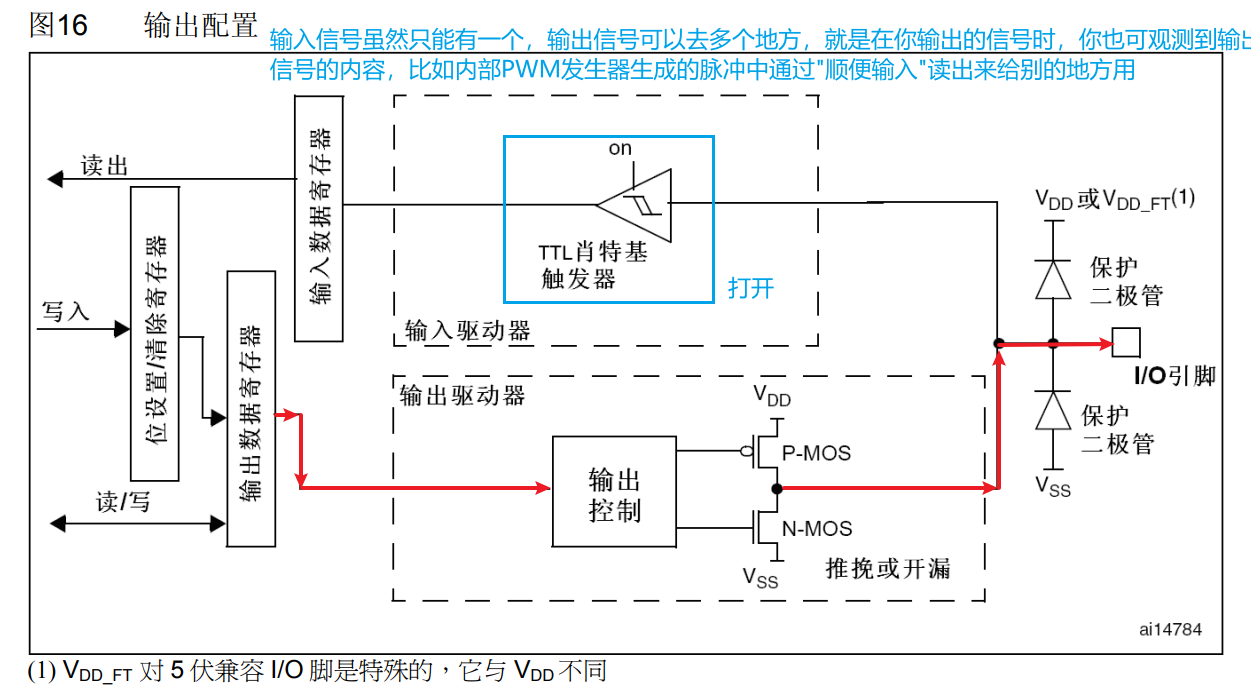
输出模式(数字输出):
- 开漏输出:可输出引脚电平,高电平为高阻态,低电平接VSS
- 推挽输出:可输出引脚电平,高电平接VDD,低电平接VSS
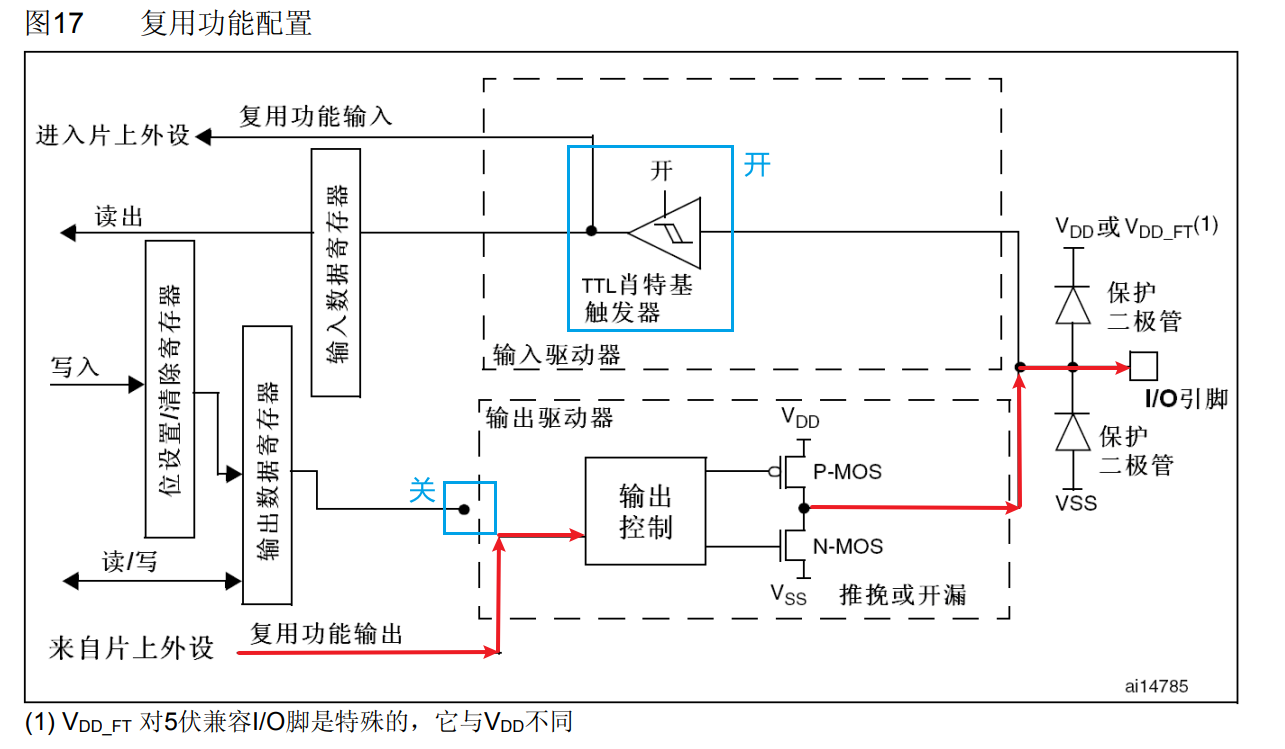
- 复用开漏输出:由片上外设控制,高电平为高阻态,低电平接VSS
- 复用推挽输出:由片上外设控制,高电平接VDD,低电平接VSS
GPIO的使用方法
STM32 的每个 IO 端口都有 7 个寄存器来控制,常用的 IO 端口寄存器只有 4 个CRL、CRH、IDR、ODR :
-
端口配置寄存器:配置寄存器使用来设置GPIO端口和此端口的应用模式
-
端口配置低寄存器(GPIOx_CRL)(x=A..E):
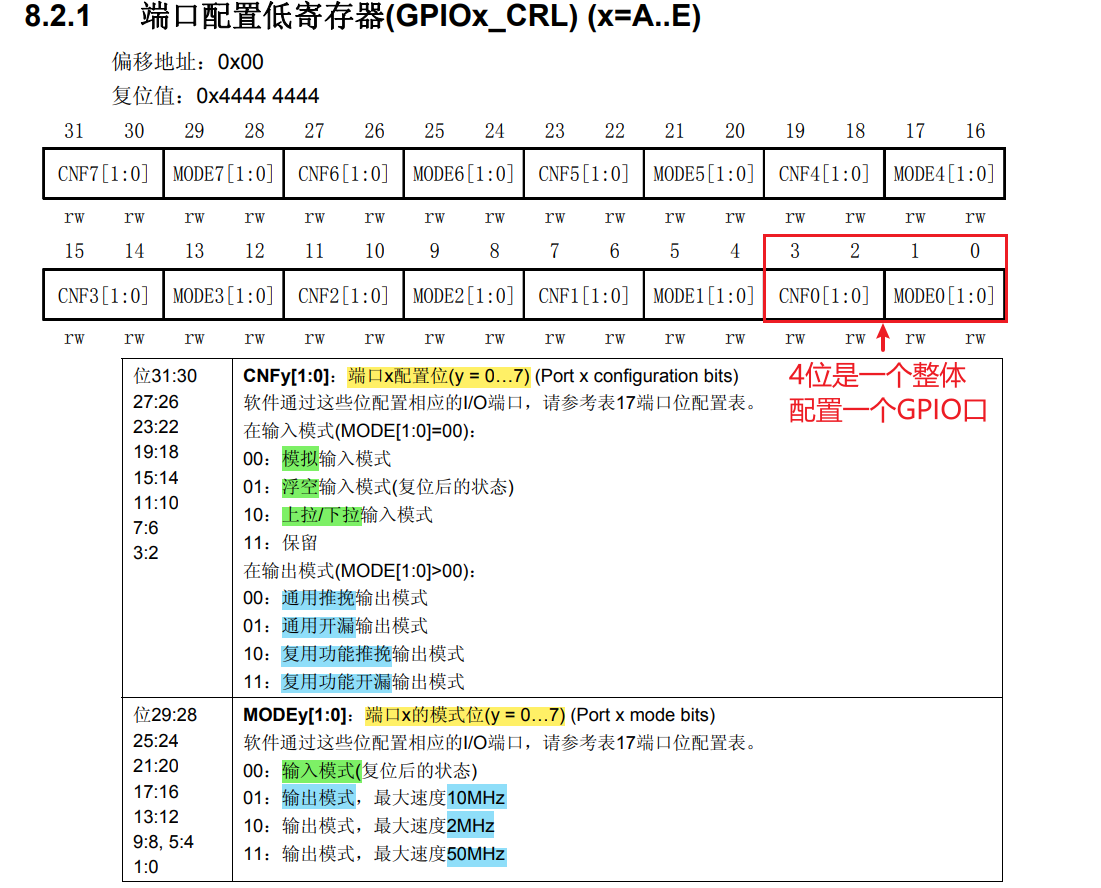
STM32 的
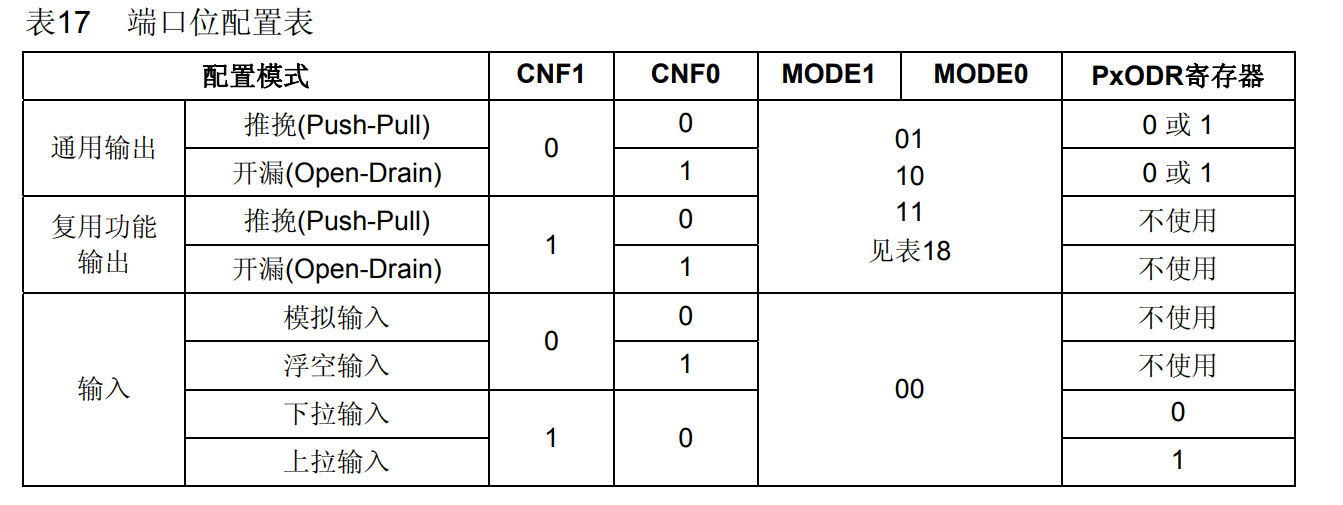
CRL控制着PA~PG的低 8 位(IO0~IO7)的模式。 每个 IO 端口使用CRL的 4 个位,高两位为CNF,低两位为MODEGPIOA->CRL &= ~(0xf<<4);//PA1-->端口配置低寄存器清0 GPIOA->CRL |= (0x3<<4);//PA1-->端口配置低寄存器设置为:输出模式,最大速度50MHz,通用开漏输出模式GPIOA->CRL &= ~(0xf<<4);//PA1-->端口配置低寄存器清0 GPIOA->CRL |= (0x8<<4);//PA1-->端口配置低寄存器设置为:输入模式,上拉/下拉输入模式 GPIOC->ODR = (0X1<<1); //设置成上拉输入。这里为什么是ODR 是因为手册上有说明 虽然在设置IO输入后,输出是断开的,但是不影响ODR数据寄存器的使用 可以设置其为上下拉输入 见端口位配置表常用的配置:
- 0X0 表示模拟输入模式(ADC 用)
- 0X3 表示推挽输出模式(做输出口用, 50M 速率)
- 0X8 表示上/下拉输入模式(做输入口用)
- 0XB 表示复用输出(使用 IO 口的第二 功能,50M 速率)
-
端口配置高寄存器(GPIOx_CRH)(x=A..E):
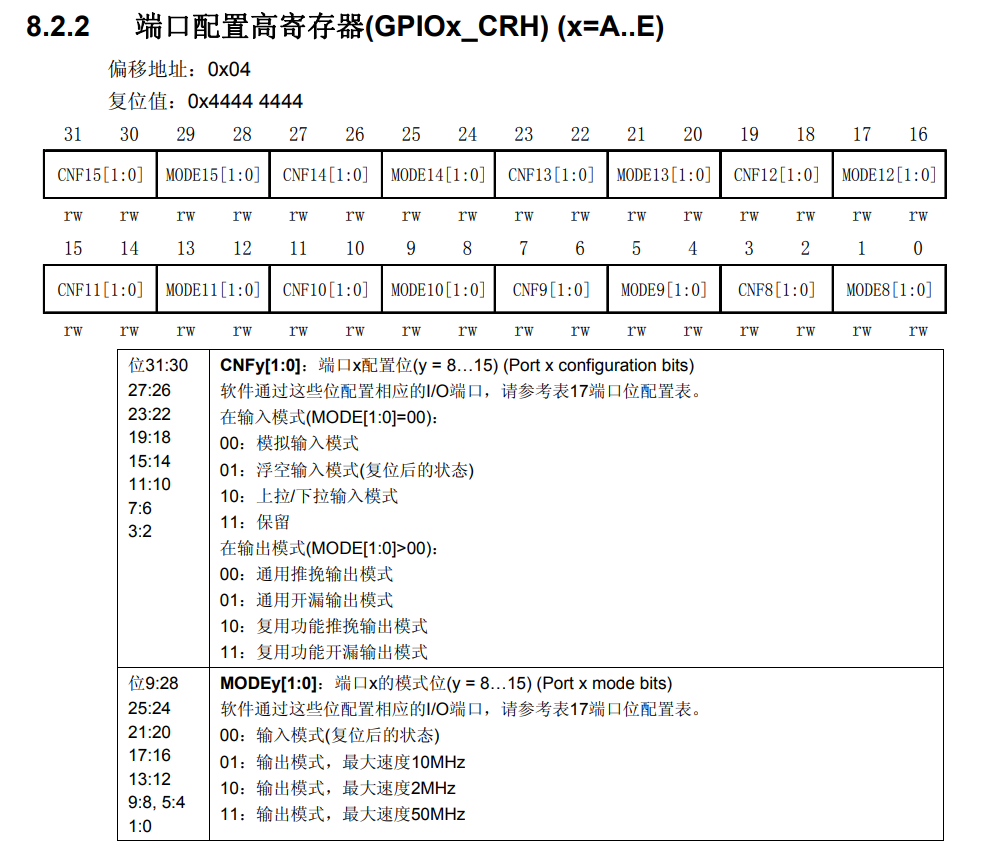
STM32 的
CRH控制着PA~PG的低 8 位(IO8~IO15)的模式。 每个 IO 端口使用CRH的 4 个位,高两位为CNF,低两位为MODE由于和CRL使用一样就不再赘述
-
-
端口数据寄存器:我自己的理解就是可以通过对以下的寄存器的配置就可以使IO口读取或者输出数据(0或1)
-
端口输入数据寄存器(GPIOx_IDR)(x=A..E):
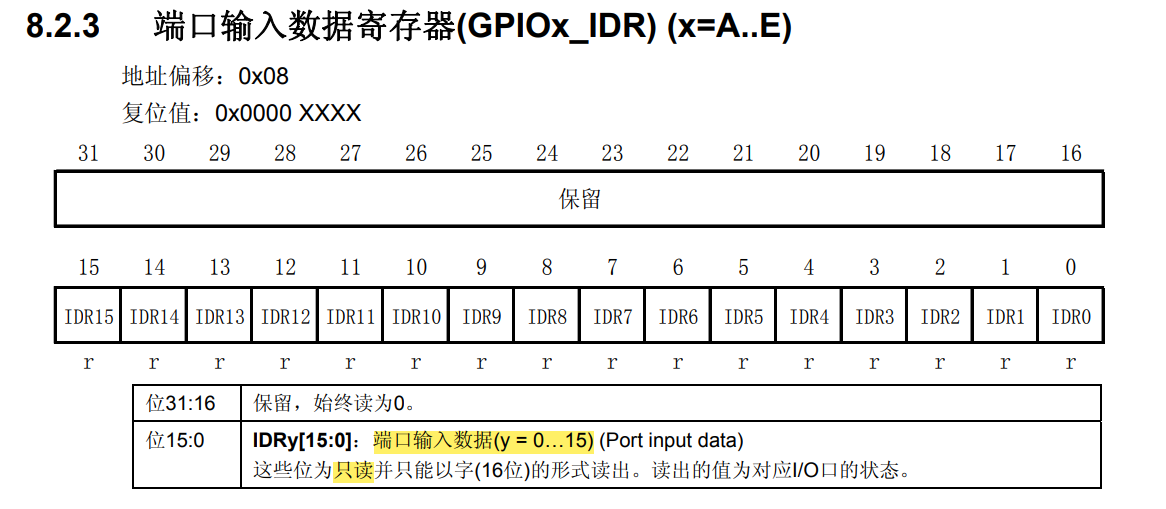
IDR是一个端口输入数据寄存器,只用了低 16 位。该寄存器为只读寄存器,并且只能以 16 位的形式读出#define KEY1 (GPIOA->IDR & (0x1<<0)) //GPIOA->IDR输入数据 读取PA0的状态 和1相与 //①按键按下低电平 有效--> KEY1==0;②按键按下高电平 有效-->KEY1==1; GPIOA->CRL &= ~(0xf<<0);//PA0-->端口配置低寄存器清0 GPIOA->CRL |= (0x4<<0);//PA0-->端口配置低寄存器设置为:浮空输入模式 -
端口输出数据寄存器(GPIOx_ODR)(x=A..E):
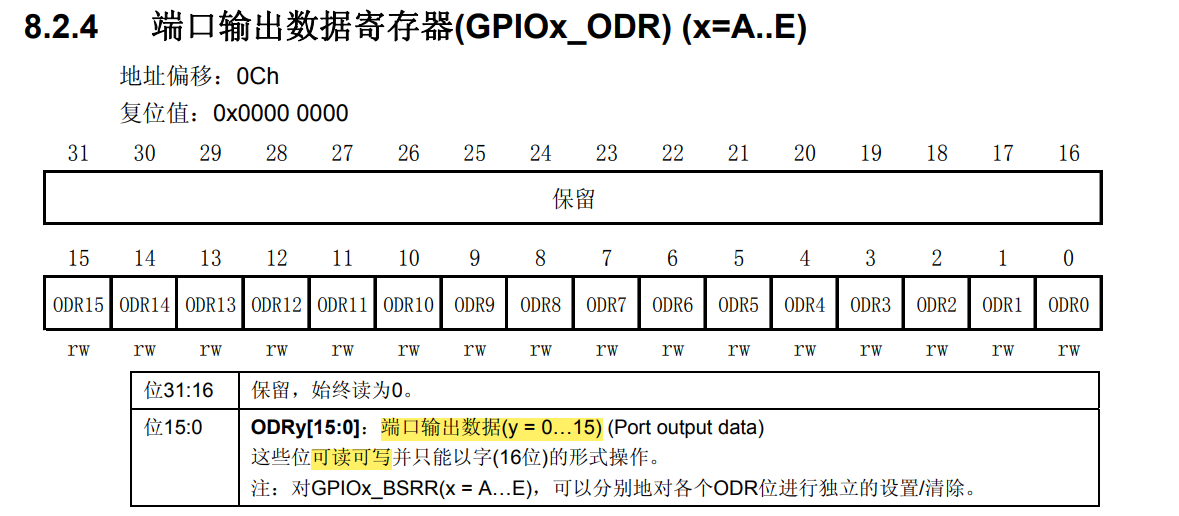
ODR是一个端口输出数据寄存器,也只用了低 16 位。该寄存器为可读写,从该寄存器读出来的数据可以用于判断当前 IO 口的输出状态。而向该寄存器写数据,则可以控制某个 IO 口 的输出电平。GPIOA->CRL &= ~(0xf<<4);//PA1-->端口配置低寄存器清0 GPIOA->CRL |= (0x3<<4);//PA1-->端口配置低寄存器设置为:输出模式,最大速度50MHz,通用开漏输出模式 //初始化后 默认的输出值为0 GPIOA->ODR |= 0X1<<4;//使其输出1
-
-
端口位设置/清除寄存器(GPIOx_BSRR) (x=A..E)
-
端口位清除寄存器(GPIOx_BRR) (x=A..E)
-
端口配置锁定寄存器(GPIOx_LCKR) (x=A..E)
GPIO的库函数
Table 1. GPIO 库函数
| 函数名 | 描述 |
|---|---|
| GPIO_DeInit | 将外设 GPIOx 寄存器重设为缺省值 |
| GPIO_AFIODeInit | 将复用功能(重映射事件控制和 EXTI 设置)重设为缺省值 |
| GPIO_Init | 根据 GPIO_InitStruct 中指定的参数初始化外设 GPIOx 寄存器 |
| GPIO_StructInit | 把 GPIO_InitStruct 中的每一个参数按缺省值填入 |
| GPIO_ReadInputDataBit | 读取指定端口管脚的输入 |
| GPIO_ReadInputData | 读取指定的 GPIO 端口输入 |
| GPIO_ReadOutputDataBit | 读取指定端口管脚的输出 |
| GPIO_ReadOutputData | 读取指定的 GPIO 端口输出 |
| GPIO_SetBits | 设置指定的数据端口位 |
| GPIO_ResetBits | 清除指定的数据端口位 |
| GPIO_WriteBit | 设置或者清除指定的数据端口位 |
| GPIO_Write | 向指定 GPIO 数据端口写入数据 |
| GPIO_PinLockConfig | 锁定 GPIO 管脚设置寄存器 |
| GPIO_EventOutputConfig | 选择 GPIO 管脚用作事件输出 |
| GPIO_EventOutputCmd | 使能或者失能事件输出 |
| GPIO_PinRemapConfig | 改变指定管脚的映射 |
| GPIO_EXTILineConfig | 选择 GPIO 管脚用作外部中断线路 |
GPIO_Init 函数
Table 2. 函数 GPIO_Init
| 函数名 | GPIO_Init |
|---|---|
| 函数原形 | void GPIO_Init(GPIO_TypeDef* GPIOx, GPIO_InitTypeDef* GPIO_InitStruct) |
| 功能描述 | 根据 GPIO_InitStruct 中指定的参数初始化外设 GPIOx 寄存器 |
| 输入参数 1 | GPIOx:x 可以是 A,B,C,D 或者 E,来选择 GPIO 外设 |
| 输入参数 2 | GPIO_InitStruct:指向结构 GPIO_InitTypeDef 的指针,包含了外设 GPIO 的配置信息参阅 Section: GPIO_InitTypeDef 查阅更多该参数允许取值范围 |
| 输出参数 | 无 |
| 返回值 | 无 |
| 先决条件 | 无 |
| 被调用函数 | 无 |
GPIO_InitTypeDef structure结构体:
/*
GPIO_InitTypeDef 定义于文件"stm32f10x_gpio.h":
*/
typedef struct {
u16 GPIO_Pin;
GPIOSpeed_TypeDef GPIO_Speed;
GPIOMode_TypeDef GPIO_Mode;
} GPIO_InitTypeDef;
GPIO_Pin
GPIO_Pin 该参数选择待设置的 GPIO 管脚,使用操作符“|”可以一次选中多个管脚。可以使用下表中的任意组合。
Table 3. GPIO_Pin 值
| GPIO_Pin | 描述 | |
|---|---|---|
| GPIO_Pin_None | 无管脚被选中 | |
| GPIO_Pin_0 | 选中管脚 0 | |
| GPIO_Pin_1 | 选中管脚 1 | |
| GPIO_Pin_2 | 选中管脚 2 | |
| GPIO_Pin_3 | 选中管脚 3 | |
| GPIO_Pin_4 | 选中管脚 4 | |
| GPIO_Pin_5 | 选中管脚 5 | |
| GPIO_Pin_6 | 选中管脚 6 | |
| GPIO_Pin_7 | 选中管脚 7 | |
| GPIO_Pin_8 | 选中管脚 8 | |
| GPIO_Pin_9 | 选中管脚 9 | |
| GPIO_Pin_10 | 选中管脚 10 | |
| GPIO_Pin_11 | 选中管脚 11 | |
| GPIO_Pin_12 | 选中管脚 12 | |
| GPIO_Pin_13 | 选中管脚 13 | |
| GPIO_Pin_14 | 选中管脚 14 | |
| GPIO_Pin_15 | 选中管脚 15 | |
| GPIO_Pin_All | 选中全部管脚 |
GPIO_Speed
GPIO_Speed 用以设置选中管脚的速率。Table 184. 给出了该参数可取的值
Table 4. GPIO_Speed 值
| GPIO_Speed | 描述 |
|---|---|
| GPIO_Speed_10MHz | 高输出速率 10MHz |
| GPIO_Speed_2MHz | 高输出速率 2MHz |
| GPIO_Speed_50MHz | 高输出速率 50MHz |
GPIO_Mode
GPIO_Mode 用以设置选中管脚的工作状态。Table 185. 给出了该参数可取的值
Table 5. GPIO_Mode 值
| GPIO_Speed | 描述 | |
|---|---|---|
| GPIO_Mode_AIN | 模拟输入 | |
| GPIO_Mode_IN_FLOATING | 浮空输入 | |
| GPIO_Mode_IPD | 下拉输入 | |
| GPIO_Mode_IPU | 上拉输入 | |
| GPIO_Mode_Out_OD | 开漏输出 | |
| GPIO_Mode_Out_PP | 推挽输出 | |
| GPIO_Mode_AF_OD | 复用开漏输出 | |
| GPIO_Mode_AF_PP | 复用推挽输出 |
注意:
-
当某管脚设置为上拉或者下拉输入模式,使用寄存器 Px_BSRR 和 PxBRR
-
GPIO_Mode 允许同时设置 GPIO 方向(输入/输出)和对应的输入/输出设置,:位[7:4]对应 GPIO 方向,位[4:0]对应配置。GPIO 方向有如下索引
-
GPIO 输入模式 = 0x00
-
GPIO 输出模式 = 0x01
-
Table 6. GPIO_Mode 的索引和编码
| GPIO方向 | 索引 | 模式 | 设置 | 模式代码 |
|---|---|---|---|---|
| GPIO Input | 0x00 | GPIO_Mode_AIN | 0x00 | 0x00 |
| GPIO_Mode_IN_FLOATING | 0x04 | 0x04 | ||
| GPIO_Mode_IPD | 0x08 | 0x28 | ||
| GPIO_Mode_IPU | 0x08 | 0x48 | ||
| GPIO Output | 0x01 | GPIO_Mode_Out_OD | 0x04 | 0x14 |
| GPIO_Mode_Out_PP | 0x00 | 0x10 | ||
| GPIO_Mode_AF_OD | 0x0C | 0x1C | ||
| GPIO_Mode_AF_PP | 0x08 | 0x18 |
例:
/* Configure all the GPIOA in Input Floating mode */
GPIO_InitTypeDef GPIO_InitStructure; //初始化结构体
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_All; //定义GPIO口
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_10MHz;//设置输出速度??
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING; //设置浮空输入
GPIO_Init(GPIOA, &GPIO_InitStructure);//初始化函数
GPIO_ReadInputDataBit 函数
Table 7. 函数 GPIO_ReadInputDataBit
| 函数名 | GPIO_ReadInputDataBit |
|---|---|
| 函数原形 | uint8_t GPIO_ReadInputDataBit(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin) |
| 功能描述 | 读取指定端口管脚的输入 |
| 输入参数 1 | GPIOx:x 可以是 A,B,C,D 或者 E,来选择 GPIO 外设 |
| 输入参数 2 | GPIO_Pin:待读取的端口位 参阅 Section:GPIO_Pin 查阅更多该参数允许取值范围 |
| 输出参数 | 无 |
| 返回值 | 输入端口管脚值 |
| 先决条件 | 无 |
| 被调用函数 | 无 |
例:
/* Reads the seventh pin of the GPIOB and store it in ReadValue variable */ u8 ReadValue;
ReadValue = GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_7);
GPIO_ReadInputData函数
Table 8. 函数 GPIO_ReadInputData
| 函数名 | GPIO_ReadInputData |
|---|---|
| 函数原形 | u16 GPIO_ReadInputData(GPIO_TypeDef* GPIOx) |
| 功能描述 | 读取指定的 GPIO 端口输入 |
| 输入参数 | GPIOx:x 可以是 A,B,C,D 或者 E,来选择 GPIO 外设 |
| 输出参数 | 无 |
| 返回值 | GPIO 输入数据端口值 |
| 先决条件 | 无 |
| 被调用函数 | 无 |
例:
/*Read the GPIOC input data port and store it in ReadValue variable*/ u16 ReadValue;
ReadValue = GPIO_ReadInputData(GPIOC);
GPIO_ReadOutputDataBit
Table 9. 函数 GPIO_ReadOutputDataBit
| 函数名 | GPIO_ReadOutputDataBit |
|---|---|
| 函数原形 | u8 GPIO_ReadOutputDataBit(GPIO_TypeDef* GPIOx, u16 GPIO_Pin) |
| 功能描述 | 读取指定端口管脚的输出 |
| 输入参数 1 | GPIOx:x 可以是 A,B,C,D 或者 E,来选择 GPIO 外设 |
| 输入参数 2 | GPIO_Pin:待读取的端口位 参阅 Section:GPIO_Pin 查阅更多该参数允许取值范围 |
| 输出参数 | 无 |
| 返回值 | 输出端口管脚值 |
| 先决条件 | 无 |
| 被调用函数 | 无 |
例:
/* Reads the seventh pin of the GPIOB and store it in ReadValue variable */ u8 ReadValue;
ReadValue = GPIO_ReadOutputDataBit(GPIOB, GPIO_Pin_7);
GPIO_ReadOutputData 函数
Table 10. 函数 GPIO_ReadOutputData
| 函数名 | GPIO_ReadOutputData |
|---|---|
| 函数原形 | u16 GPIO_ReadOutputData(GPIO_TypeDef* GPIOx) |
| 功能描述 | 读取指定的 GPIO 端口输出 |
| 输入参数 | GPIOx:x 可以是 A,B,C,D 或者 E,来选择 GPIO 外设 |
| 输出参数 | 无 |
| 返回值 | GPIO 输出数据端口值 |
| 先决条件 | 无 |
| 被调用函数 | 无 |
例:
/* Read the GPIOC output data port and store it in ReadValue variable */ u16 ReadValue;
ReadValue = GPIO_ReadOutputData(GPIOC);
GPIO_SetBits 函数
Table 11. 函数 GPIO_SetBits
| 函数名 | GPIO_SetBits |
|---|---|
| 函数原形 | void GPIO_SetBits(GPIO_TypeDef* GPIOx, u16 GPIO_Pin) |
| 功能描述 | 设置指定的数据端口位 |
| 输入参数 1 | GPIOx:x 可以是 A,B,C,D 或者 E,来选择 GPIO 外设 |
| 输入参数 2 | GPIO_Pin:待设置的端口位该参数可以取 GPIO_Pin_x(x 可以是 0-15)的任意组合参阅 Section:GPIO_Pin 查阅更多该参数允许取值范围 |
| 输出参数 | 无 |
| 返回值 | 无 |
| 先决条件 | 无 |
| 被调用函数 | 无 |
例:
/* Set the GPIOA port pin 10 and pin 15 */
GPIO_SetBits(GPIOA, GPIO_Pin_10 | GPIO_Pin_15);
GPIO_ResetBits函数
Table 12. GPIO_ResetBits
| 函数名 | GPIO_ResetBits |
|---|---|
| 函数原形 | void GPIO_ResetBits(GPIO_TypeDef* GPIOx, u16 GPIO_Pin) |
| 功能描述 | 清除指定的数据端口位 |
| 输入参数 1 | GPIOx:x 可以是 A,B,C,D 或者 E,来选择 GPIO 外设 |
| 输入参数 2 | GPIO_Pin:待清除的端口位该参数可以取 GPIO_Pin_x(x 可以是 0-15)的任意组合参阅 Section:GPIO_Pin 查阅更多该参数允许取值范围 |
| 输出参数 | 无 |
| 返回值 | 无 |
| 先决条件 | 无 |
| 被调用函数 | 无 |
例:
/* Clears the GPIOA port pin 10 and pin 15 */
GPIO_ResetBits(GPIOA, GPIO_Pin_10 | GPIO_Pin_15);
GPIO_WriteBit 函数
Table 13. 函数 GPIO_WriteBit
| 函数名 | GPIO_WriteBit |
|---|---|
| 函数原形 | void GPIO_WriteBit(GPIO_TypeDef* GPIOx, u16 GPIO_Pin, BitAction BitVal) |
| 功能描述 | 设置或者清除指定的数据端口位 |
| 输入参数 1 | GPIOx:x 可以是 A,B,C,D 或者 E,来选择 GPIO 外设 |
| 输入参数 2 | GPIO_Pin:待设置或者清除指的端口位该参数可以取 GPIO_Pin_x(x 可以是 0-15)的任意组合参阅 Section:GPIO_Pin 查阅更多该参数允许取值范围 |
| 输入参数 3 | BitVal: 该参数指定了待写入的值该参数必须取枚举 BitAction 的其中一个值 Bit_RESET: 清除数据端口位 Bit_SET: 设置数据端口位 |
| 输出参数 | 无 |
| 返回值 | 无 |
| 先决条件 | 无 |
| 被调用函数 | 无 |
例:
/* Set the GPIOA port pin 15 */
GPIO_WriteBit(GPIOA, GPIO_Pin_15, Bit_SET);
GPIO_Write 函数
Table 14. GPIO_Write
| 函数名 | GPIO_Write |
|---|---|
| 函数原形 | void GPIO_Write(GPIO_TypeDef* GPIOx, u16 PortVal) |
| 功能描述 | 向指定 GPIO 数据端口写入数据 |
| 输入参数 1 | GPIOx:x 可以是 A,B,C,D 或者 E,来选择 GPIO 外设 |
| 输入参数 2 | PortVal: 待写入端口数据寄存器的值 |
| 输出参数 | 无 |
| 返回值 | 无 |
| 先决条件 | 无 |
| 被调用函数 | 无 |
例:
/* Write data to GPIOA data port */
GPIO_Write(GPIOA, 0x1101);
GPIO的实战应用
学习了以上知识,就可以使用STM32来开始我们的实战演练了
跑马灯(点灯大师第一步)(GPIO输出)
使用寄存器来点亮LED
此点灯过程中默认LED灯正极是插在3.3V下的,也就是IO输出低电平点亮
led.h
#ifndef __LED_H__
#define __LED_H__
#include "stm32f10x.h"
void Led_Init(void);
void Led_ON(void);
void Led_OFF(void);
#endif
led.c
#include "led.h"
void Led_Init(void)
{
RCC->APB2ENR |= 0x1<<2; //使能端口A时钟
GPIOA->CRL &= ~(0xff<<0);//PA0,PA1-->端口配置低寄存器清0
GPIOA->CRL |= (0x33<<0);//PA0,PA1-->端口配置低寄存器设置为:输出模式,最大速度50MHz,通用开漏输出模式
GPIOA->ODR |= 0X3<<1;//初始化后将PA0,PA1--IO口置1
}
void Led_ON(void)
{
GPIOA->ODR &= ~(0X1<<1);//PA1置0
}
void Led_OFF(void)
{
GPIOA->ODR |= (0X1<<1);//PA1置1
}
main.c
#include "stm32f10x.h" // Device header
#include "led.h"
int main(void)
{
Led_Init();
Led_ON();
while(1)
{
LED0TURN;//高阶玩法-->PA0闪烁
Delay_ms(500);//见下方中delay.c和delay.h
}
}
高阶玩法:
- 使用宏定义带参数
//写在led.h头文件中
/*
x==1 灯亮
x==0 灯灭
宏定义带参数,采用三目运算法
*/
#define LED0(x) (x)?(GPIOA->ODR &= ~(0x1<<0)):(GPIOE->ODR |= (0x1<<0)) //PA0
#define LED1(x) (x)?(GPIOA->ODR &= ~(0x1<<1)):(GPIOE->ODR |= (0x1<<1)) //PA1
#define LED2(x) (x)?(GPIOA->ODR &= ~(0x1<<2)):(GPIOE->ODR |= (0x1<<2)) //PA2
#define LED3(x) (x)?(GPIOA->ODR &= ~(0x1<<3)):(GPIOE->ODR |= (0x1<<3)) //PA3
//在主函数直接使用LED1(1) 就可以将 PA0处的小灯点亮
/*
使用 异或 来控制LED灯的亮灭
相同为0,不同为1
与0异或,为其本身
与1异或,0,1互换
xxxx xxxx xxxx x1xx
^
0000 0000 0000 0100
xxxx xxxx xxxx x0xx
*/
#define LED0TURN GPIOA->ODR ^= (0x1<<0)//PA0
#define LED1TURN GPIOA->ODR ^= (0x1<<1)//PA1
#define LED2TURN GPIOA->ODR ^= (0x1<<2)//PA2
#define LED3TURN GPIOA->ODR ^= (0x1<<3)//PA3
//在主函数main.c的while(1)直接使用LED1TURN和延时函数可以实现LED闪烁
delay.h
#ifndef __DELAY_H
#define __DELAY_H
#include "stdint.h" //加上就是可以让编译器找到uint32_t 这个关键字
void Delay_us(uint32_t us);
void Delay_ms(uint32_t ms);
void Delay_s(uint32_t s);
#endif
delay.c
#include "stm32f10x.h"
#include "Delay.h"
/**
* @brief 微秒级延时
* @param xus 延时时长,范围:0~233015
* @retval 无
*/
void Delay_us(uint32_t xus)
{
SysTick->LOAD = 72 * xus; //设置定时器重装值
SysTick->VAL = 0x00; //清空当前计数值
SysTick->CTRL = 0x00000005; //设置时钟源为HCLK,启动定时器
while(!(SysTick->CTRL & 0x00010000)); //等待计数到0
SysTick->CTRL = 0x00000004; //关闭定时器
}
/**
* @brief 毫秒级延时
* @param xms 延时时长,范围:0~4294967295
* @retval 无
*/
void Delay_ms(uint32_t xms)
{
while(xms--)
{
Delay_us(1000);
}
}
/**
* @brief 秒级延时
* @param xs 延时时长,范围:0~4294967295
* @retval 无
*/
void Delay_s(uint32_t xs)
{
while(xs--)
{
Delay_ms(1000);
}
}
-
使用位带操作
未待完续
使用库函数来点亮LED
此点灯过程中默认LED灯正极是插在3.3V下的,也就是IO输出低电平点亮
led.h
#ifndef __LED_H__
#define __LED_H__
#include "stm32f10x.h"
void Led_Init(void);
#endif
led.c
#include "led.h"
void Led_Init(void)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);//使能时钟A
//为初始化函数做准备
GPIO_InitTypeDef GPIO_InitStructure;//定义结构体
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0;//设置PA1引脚
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP ;//设置输出模式为推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz ;//设置输出速度为50MHZ
//初始化函数↓
GPIO_Init(GPIOA,&GPIO_InitStructure);//初始化
GPIO_SetBits(GPIOA,GPIO_Pin_0); //初始化时默认低电平,我们主动设置输出高电平,点灭LED
}
main.c
#include "stm32f10x.h" // Device header
#include "led.h"
int main(void)
{
Led_Init();
//GPIO_ResetBits(GPIOA, GPIO_Pin_0);//重新初始化PA0--IO,初始化后值为0,点亮
GPIO_WriteBit(GPIOA,GPIO_Pin_0,Bit_SET); //第三项可直接赋值:枚举、Bit_SET--高电平熄灭/Bit_RESET--低电平点亮
while(1)
{
//以下就可以使PA0--LED进行闪烁
GPIO_ResetBits(GPIOA,GPIO_Pin_0); //输出低电平 点亮LED
Delay_ms(500);
GPIO_SetBits(GPIOA,GPIO_Pin_0); //输出高电平,点灭LED
Delay_ms(500);
GPIO_WriteBit(GPIOA,GPIO_Pin_0,Bit_RESET);//输出低电平 点亮LED
Delay_ms(500);
GPIO_WriteBit(GPIOA,GPIO_Pin_0,Bit_SET);//输出高电平,点灭LED
Delay_ms(500);
GPIO_WriteBit(GPIOA,GPIO_Pin_0,(BitAction)0);//输出高电平,点灭LED,0前面要加上强制类型转换 转换成枚举类型
Delay_ms(500);
GPIO_WriteBit(GPIOA,GPIO_Pin_0,(BitAction)1);//输出高电平,点灭LED,1前面要加上强制类型转换 转换成枚举类型
Delay_ms(500);
}
}
在推挽输出的模式下,此时可以将LED灯正极接到IO口,负极接到GND,发现LED会继续闪烁,证实了推挽输出高低电平都具有驱动能力,如果此时再将输出模式改为开漏模式,LED将不再闪烁,证实了开漏模式在IO输出高电平时为高阻态
流水灯
PA0-->PA7的流水灯
led.h
#ifndef __LED_H__
#define __LED_H__
#include "stm32f10x.h"
void Led_Init(void);
#endif
led.c
#include "led.h"
void Led_Init(void)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);//使能时钟A
//为初始化函数做准备
GPIO_InitTypeDef GPIO_InitStructure;//定义结构体
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_ALL;//设置PA1引脚
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP ;//设置输出模式为推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz ;//设置输出速度为50MHZ
//初始化函数↓
GPIO_Init(GPIOA,&GPIO_InitStructure);//初始化
GPIO_SetBits(GPIOA,GPIO_Pin_ALL); //初始化时默认低电平,我们主动设置输出高电平,点灭LED
}
main.c
#include "stm32f10x.h" // Device header
#include "led.h"
#include "Delay.h"
int main(void)
{
Led_Init();
unsigned int i = 0;
while(1)
{
GPIO_Write(GPIOA,~0x0001); //0000 0000 0000 0001 <--二进制 GPIO_Write第二个参数必须是16进制 注释只是形象解释
Delay_ms(500);
GPIO_Write(GPIOA,~0x0002); //0000 0000 0000 0010
Delay_ms(500);
GPIO_Write(GPIOA,~0x0004); //0000 0000 0000 0100
Delay_ms(500);
GPIO_Write(GPIOA,~0x0008); //0000 0000 0000 1000
Delay_ms(500);
GPIO_Write(GPIOA,~0x0010); //0000 0000 0001 0000
Delay_ms(500);
GPIO_Write(GPIOA,~0x0020); //0000 0000 0010 0000
Delay_ms(500);
GPIO_Write(GPIOA,~0x0040); //0000 0000 0100 0000
Delay_ms(500);
GPIO_Write(GPIOA,~0x0080); //0000 0000 1000 0000
Delay_ms(500);
//下面这个是上面的简易写法 同样实现PA0-->PA7的流水灯的效果
/*
for(i=0;i<8;i++)
{
GPIO_Write(GPIOA,~(0x1<<i));
Delay_ms(500);
}
*/
}
}
蜂鸣器(GPIO输出)
有源蜂鸣器是有正负引脚的和IO口引脚的,在IO引脚加上电压信号就会发声,发出的声音音调单一、频率固定,本次使用的蜂鸣器是低电平触发
Beep.h
#ifndef __BEEP_H__
#define __BEEP_H__
#include "stm32f10x.h"
void Beep_Init(void);
#endif
Beep.c
#include "Beep.h"
void Beep_Init(void)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);//使能时钟B
//为初始化函数做准备
GPIO_InitTypeDef GPIO_InitStructure;//定义结构体
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_12;//设置PB的12引脚
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP ;//设置输出模式为推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz ;//设置输出速度为50MHZ
//初始化函数↓
GPIO_Init(GPIOB,&GPIO_InitStructure);//初始化
GPIO_SetBits(GPIOB,GPIO_Pin_12); //初始化时默认低电平,我们主动设置输出高电平,使蜂鸣器不响
}
main.c
#include "stm32f10x.h" // Device header
#include "led.h"
#include "Delay.h"
#include "Beep.h"
int main(void)
{
Beep_Init();//蜂鸣器初始化,蜂鸣器的IO口设置在PB12
while(1)
{
GPIO_Write(GPIOB,~(0X1<<12));
Delay_ms(100);
GPIO_Write(GPIOB,(0X1<<12));
Delay_ms(100);
GPIO_Write(GPIOB,~(0X1<<12));
Delay_ms(100);
GPIO_Write(GPIOB,(0X1<<12));
Delay_ms(700);
}
}
按键(GPIO输入)
在GPIO的工作模式中我们知道,GPIO输入模式下有四种方式:浮空输入,上拉输入,下拉输入和模拟输入,前三种都属于数字输入,也是此章节所学习和使用的模式,模拟输入是在ADC章节中所学习使用,在后面的学习过程中介绍。
何时使用那种输入方式,其实是看所使用的场景和硬件设计要求
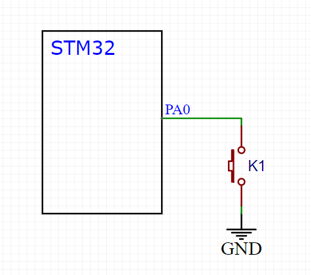
- 下图中,按键按下低电平有效---->我们就要使GPIO的输入模式默认为上拉输入,也就是在空闲状态下默认高电平,此时不能使用浮空输入是因为 引脚悬空会造成电平不确定,而下拉更不能使用,因为下拉默认低电平,就会造成按键无用
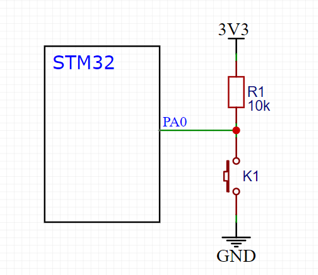
- 下图中,按键按下低电平有效---->此时因为有个上拉电阻R1的存在,PA0默认高电平,所以此时我们可以使GPIO的输入模式使用上拉输入或者浮空输入都可以
- 下图中,按键按下高电平有效---->我们就要使GPIO的输入模式默认为下拉输入,也就是在空闲状态下默认低电平,此时不能使用浮空输入是因为 引脚悬空会造成电平不确定,而上拉更不能使用,因为上拉默认高电平,就会造成按键无用
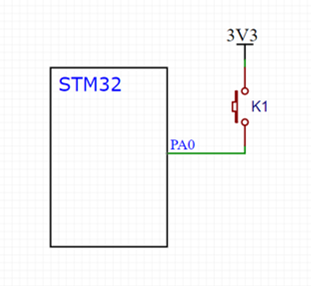
- 下图中,按键按下高电平有效---->此时因为有个下拉电阻R1的存在,PA0默认低电平,所以此时我们可以使GPIO的输入模式使用下拉输入或者浮空输入都可以

使用寄存器按键来控制LED
以下示例是按键按下时低电平触发,IO引脚空闲状态为高电平,上拉输入
led.h
#ifndef __LED_H__
#define __LED_H__
#include "stm32f10x.h"
void Led_Init(void);
void LED1_ON(void);
void LED2_ON(void);
void LED1_OFF(void);
void LED2_OFF(void);
void LED1_Turn(void);
void LED2_Turn(void);
#endif
led.c
#include "led.h"
void Led_Init(void)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);//使能时钟A
//为初始化函数做准备
GPIO_InitTypeDef GPIO_InitStructure;//定义结构体
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_1|GPIO_Pin_2;//设置PA1,PA2引脚
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP ;//设置输出模式为推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz ;//设置输出速度为50MHZ
//初始化函数↓
GPIO_Init(GPIOA,&GPIO_InitStructure);//初始化
GPIO_Write(GPIOA,(0X6));//初始化时默认低电平,我们主动设置输出高电平,点灭LED
//GPIO_SetBits(GPIOA,GPIO_Pin_1|GPIO_Pin_2); //使用上面或者下面这种方式都可以将其设置为高电平
}
void LED1_ON(void)
{
GPIO_ResetBits(GPIOA,GPIO_Pin_1);
}
void LED1_OFF(void)
{
GPIO_SetBits(GPIOA,GPIO_Pin_1);
}
void LED1_Turn(void)//PA1状态翻转
{
if(GPIO_ReadOutputDataBit(GPIOA,GPIO_Pin_1) == 0)//这个函数就是用来检测端口输出状态的函数,当检测输出端口为0时,将PA1置1
{
GPIO_SetBits(GPIOA,GPIO_Pin_1);
}
else
{
GPIO_ResetBits(GPIOA,GPIO_Pin_1);//当检测输出端口为1时,将PA1置0
}
}
void LED2_ON(void)
{
GPIO_ResetBits(GPIOA,GPIO_Pin_2);
}
void LED2_OFF(void)
{
GPIO_SetBits(GPIOA,GPIO_Pin_2);
}
void LED2_Turn(void)//PA2状态翻转
{
if(GPIO_ReadOutputDataBit(GPIOA,GPIO_Pin_2) == 0)//这个函数就是用来检测端口输出状态的函数,当检测输出端口为0时,将PA1置1
{
GPIO_SetBits(GPIOA,GPIO_Pin_2);
}
else
{
GPIO_ResetBits(GPIOA,GPIO_Pin_2);//当检测输出端口为1时,将PA1置0
}
}
key.h
#ifndef __KEY_H__
#define __KEY_H__
#include "stm32f10x.h"
#include "Delay.h"
void Key_Init(void);
uint8_t Key_GetNum(void);
#define KEY1 (GPIOB->IDR & (0x1<<1)) //GPIOB->IDR输入数据 读取PB1的状态 和1相与
#define KEY2 (GPIOB->IDR & (0x1<<11)) //GPIOB->IDR输入数据 读取PB11的状态 和1相与
#endif
key.c
#include "Key.h"
void Key_Init(void)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);//使能时钟B
//为初始化函数做准备
GPIO_InitTypeDef GPIO_InitStructure;//定义结构体
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_11|GPIO_Pin_1;//设置PB的1号和11号引脚
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU ;//设置输出模式为上拉输入
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz ;//设置输出速度为50MHZ,GPIO输入时此参数无效 但一般还是设置上
//初始化函数↓
GPIO_Init(GPIOB,&GPIO_InitStructure);//初始化
}
uint8_t Key_GetNum(void)
{
if(!KEY1)//与0x01相与后为0 --> 按键按下
{
Delay_ms(15);//延时消抖
if(!KEY1)
{
while(!KEY1)//等待按键抬起
{
}
Delay_ms(15);//延时消抖
return 1;
}
}
if(!KEY2)//与0x01相与后为0 --> 按键按下
{
Delay_ms(15);//延时消抖
if(!KEY2)
{
while(!KEY2)//等待按键抬起
{
}
Delay_ms(15);//延时消抖
return 2;
}
}
return 0;
}
main.c
#include "stm32f10x.h" // Device header
#include "led.h"
#include "Delay.h"
#include "Beep.h"
#include "Key.h"
int main(void)
{
uint8_t keyflag=0;//按键标志位
Led_Init();
Key_Init();
while(1)
{
keyflag = Key_GetNum();
switch(keyflag)
{
case 1:
LED1_Turn();break;
case 2:
LED2_Turn();break;
case 3:break;
case 4:break;
}
}
}
使用库函数按键来控制LED
以下示例是按键按下时低电平触发,IO引脚空闲状态为高电平,上拉输入
main.c,led.c和led.h都与使用寄存器按键来控制LED章节一致
key.h
#ifndef __KEY_H__
#define __KEY_H__
#include "stm32f10x.h"
#include "Delay.h"
void Key_Init(void);
uint8_t Key_GetNum(void);
#endif
key.c
#include "Key.h"
void Key_Init(void)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);//使能时钟B
//为初始化函数做准备
GPIO_InitTypeDef GPIO_InitStructure;//定义结构体
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_11|GPIO_Pin_1;//设置PB的1号和11号引脚
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU ;//设置输出模式为上拉输入
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz ;//设置输出速度为50MHZ,GPIO输入时此参数无效 但一般还是设置上
//初始化函数↓
GPIO_Init(GPIOB,&GPIO_InitStructure);//初始化
}
uint8_t Key_GetNum(void)
{
uint8_t KeyNum = 0;//设置一个返回值变量 未按下-->返回值==0 ; key1按下-->返回值1 key2按下-->返回值2
if(GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_1) == 0)//GPIO_ReadInputDataBit的返回值是 读取IO引脚的状态值 那么按下时就是0所以 == 0为真
{
Delay_ms(20);//按下时防抖
while(GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_1) == 0);//直到按键弹起 再进行下一步操作
Delay_ms(20);//弹起时防抖
KeyNum = 1;
}
if(GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_11) == 0)//GPIO_ReadInputDataBit的返回值是 读取IO引脚的状态值 那么按下时就是0所以 == 0为真
{
Delay_ms(20);//按下时防抖
while(GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_11) == 0);//直到按键弹起 再进行下一步操作
Delay_ms(20);//弹起时防抖
KeyNum = 2;
}
return KeyNum;
}
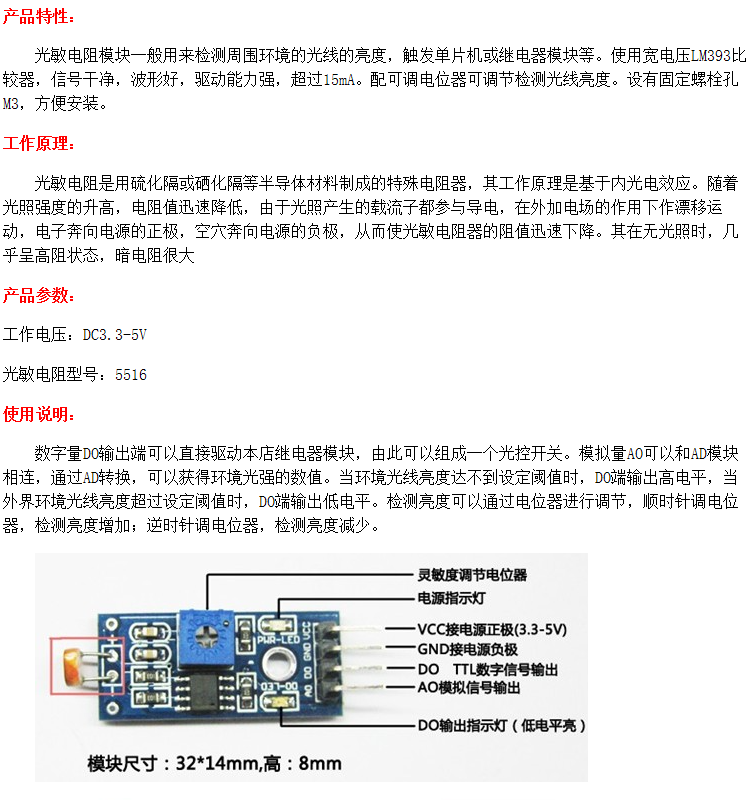
使用光敏传感器来控制蜂鸣器(库函数)
光源充足的时候蜂鸣器不鸣叫,光源较暗时蜂鸣器鸣叫
LightSensor.h
#ifndef __LIGHTSENSOR_H__
#define __LIGHTSENSOR_H__
#include "stm32f10x.h"
void LightSen_Init(void);
uint8_t Lightsen_Get(void);
#endif
LightSensor.c
#include "LightSensor.h"
void LightSen_Init(void)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);//使能时钟B
//为初始化函数做准备
GPIO_InitTypeDef GPIO_InitStructure;//定义结构体
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_13;//设置PB的12引脚
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU ;//设置上拉模式
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz ;//设置输出速度为50MHZ,在输入模式下无效
//初始化函数↓
GPIO_Init(GPIOB,&GPIO_InitStructure);//初始化
}
uint8_t Lightsen_Get(void)
{
return GPIO_ReadInputDataBit(GPIOB,GPIO_Pin_13);
}
Beep.h
#ifndef __BEEP_H__
#define __BEEP_H__
#include "stm32f10x.h"
void Beep_Init(void);
void Beep_ON(void);
void Beep_OFF(void);
void Beep_Turn(void);
#endif
Beep.c
#include "Beep.h"
void Beep_Init(void)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);//使能时钟B
//为初始化函数做准备
GPIO_InitTypeDef GPIO_InitStructure;//定义结构体
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_12;//设置PB的12引脚
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP ;//设置输出模式为推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz ;//设置输出速度为50MHZ
//初始化函数↓
GPIO_Init(GPIOB,&GPIO_InitStructure);//初始化
GPIO_SetBits(GPIOB,GPIO_Pin_12); //初始化时默认低电平,我们主动设置输出高电平,使蜂鸣器不响
}
void Beep_ON(void)
{
GPIO_ResetBits(GPIOB,GPIO_Pin_12);
}
void Beep_OFF(void)
{
GPIO_SetBits(GPIOB,GPIO_Pin_12);
}
void Beep_Turn(void)
{
if(GPIO_ReadOutputDataBit(GPIOB,GPIO_Pin_12) == 0)//这个函数就是用来检测端口输出状态的函数,当检测输出端口为0时,将PB12置1
{
GPIO_SetBits(GPIOB,GPIO_Pin_12);
}
else
{
GPIO_ResetBits(GPIOB,GPIO_Pin_12);//当检测输出端口为1时,将PA1置0
}
}
main.c
#include "stm32f10x.h" // Device header
#include "led.h"
#include "Delay.h"
#include "Beep.h"
#include "Key.h"
#include "LightSensor.h"
int main(void)
{
Beep_Init();
LightSen_Init();
while(1)
{
if(Lightsen_Get() == 1)//光线较暗时,蜂鸣器鸣叫,Lightsen_Get()返回的值是默认的上拉模式高电平
{
Beep_ON();
}
else
{
Beep_OFF();
}
}
}
热门相关:豪门蜜爱:独宠天后小萌妻 魔神狂后 魔神狂后 重生之嫡女祸妃 楚氏赘婿